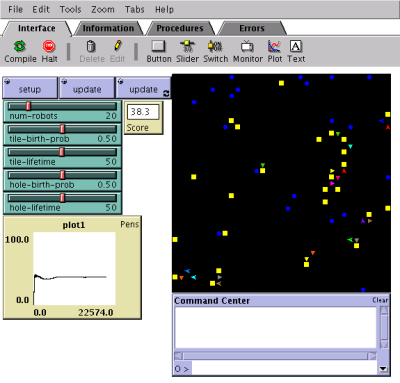
Figure 1: The Tileworld implementation you will be using. Click on the picture to see the applet run and get the source code, or get the source code here
Figure 1: The Tileworld implementation you will be using. Click on the picture to see the applet run and get the source code, or get the source code here
For this problem I have recreated the Tileworld, as described in pages 37-39 of the textbook, shown in Figure 1. Your goal is to solve the tileworld problem. You will be graded on how well you explain your approach as well as on how well your program performs. The tileworld originally appeared in
In my implementation, each time the update function
is called all the agents (which I call robots) get a chance
to move one unit. At each time a new tile appears with
probability tile-birth-prob and lives exactly
tile-lifetime. Similarty, at each time a new hole
appears with probability hole-birth-prob and lives
exactly hole-lifetime. The score is
calculated using the formula from page 38 of the textbook,
that is, the percentage of holes filled with respect to the
total number of holes that have appeared.
You should concentrate on improving the agents' ability to move quickly move a tile to a hole before it dissapears, and without getting in each others' way.
Whenever your robot needs to move it should set the heading
it wants (making sure that it is one of 0,90,180,270) and
call move-one to move one step in that
direction. This function makes sure that any tiles or other
agents that are in that location are pushed away. This also
means that one robot can push another one.
I will test your program with
num-robots=1,2,3,10,20, tile-birth-prob =
hole-birth-prob = .5, tile-lifetime 50,
hole-lifetime = 20 and with other variations on those
numbers in order to test the robustness of your approach.
time-to-live of the tiles and holes.
This problem set is to be done individually. You cannot ask or receive help from anyone. As will all the problem sets, you will hand them in using our department's dropbox. For the netlogo problem sets you will hand in only one file, your .nlogo file. You will use the information tab of the program for writing your detailed explanation of the techniques you used, how the program works, how to set the controls to obtain the different behaviors you want to show, etc. The information tab needs to start with:
Name:
email:
ID: (Choose any random number. This number will be your ID for this course.)
I understand that it is the responsibility of every member of the
Carolina community to uphold an maintain the academic standards and
integrity of the University of South Carolina. Any member of the
University community, who has reasonable grounds to believe that an
infraction of the Code of Student Academic Responsibility has
occurred, has an obligation to report the alleged violation.
I certify that I have neither given nor received unauthorized aid on
this problem set.